Elk test driven automatically
with VEHICO
Objective test results without driver influence!
With the VEHICO steering robot CS-B and the VEHICO lane guidance CO.Track, the driver's influence can be completely eliminated during the ISO lane change test.



Test Equipment
Required Components

Steering Robot
Our steering robots, in combination with the vehicle dynamics control, are the ide-al equipment for ISO lane change tests.

Driving Dynamics Control
The automatic track guidance CO.Track enables exact tracking of track-related xy-coordinates.

Location Sensors
Regardless of whether location sensor technology from GeneSys, OxTS, Racelogic or iMAR is available, any GNSS sensor equipped with an IMU (Inertial Measurement Unit) can be used.
Test Equipment
By combining the VEHICO steering robot CS-B with the VEHICO CO.Track lane guidance, test vehicle can automatically drive through the pylon lanes in a track-controlled manner.
Both the steering robot and the CO.Track guidance have the ability to generate the required steering angular velocities and lateral accelerations which are necessary for a highly dynamic lane change test.

Current guidelines
The German Association of the Automotive Industry (VDA) has transferred the evasive manoeuvre originally known as the "Elk Test" into the International Standard ISO 3888-2 after a revision. The ISO or VDA lane change test is used to assess the handling behaviour of a vehicle and is an integral part of vehicle development and vehicle assessment.
There are two different standards:
- ISO 3888-1
- ISO 3888-2

Versuchsbeschreibung
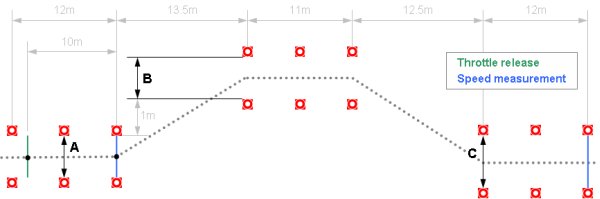
The double ISO lane change (ISO 3888-2) consists of an entry and exit lane with a length of 12 m and an escape lane with a length of 11 m. The width of the entry and escape lane depends on the vehicle width. The width of the entry and exit lanes depend on the width of the vehicle, while the width of the exit lane is a constant 3 m. The lane offset between the entry and exit lanes is the same as for the exit lane. The lane offset between the entry and escape lanes is 1 m and the longitudinal offset is 13.5 m. If the lane offset is the same, the dodge and exit lane has a slightly shorter longitudinal offset of 12.5 m.
2 m after the start of the entry lane, the throttle is removed so that the entire swerving process is completed in thrust mode and in the highest gear at at least 2000 rpm engine speed. At the end of the entry and exit lane, the speed is measured. The entry speed is successively increased.
If no pylons are knocked over, the test is considered passed.
Test Procedure
The test vehicle can be equipped in a very short time due to the quick installation of our driving robot. There is no need to set up a pylon alley.
Automatically driven ISO lane change
Advantages of the VEHICO driving robots
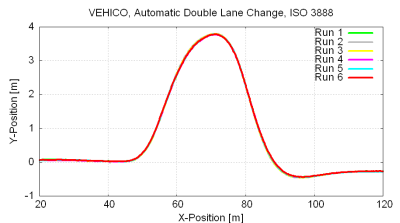
With our technology, it is possible for the first time to objectify the lane change test and thus achieve clear and unambiguous test results. The driving robot negotiates the pylon lanes with a reproducibility that no human driver possesses.
To show this, we repeated the same lane change manoeuvre with the driving robot several times at the same speed and plotted it graphically. It can be clearly seen that even in the critical areas with maximum lateral acceleration reproducibility of only a few cm is ensured.
In addition, our driving robot convinces with the following advantages:
- fast installation and configuration of the steering robot - ready to use for testing in about 1 hour
- no elaborate positioning of cone lanes needed
- read in sensor data over CAN bus
- all data is recorded and displayed under real-time conditions by the steering robot
- simple graphic analysis by driving robot software
Contact
Contact us
Do you have further questions or need more information?
We will be pleased to help you.
Contact us or one of our Salespartner.
Phone
+49 531 20835 110