Syncronisiertes Fahren
dank modernster Technologie auch für dynamische Fahrmanöver
Mit CO.Sync werden zwei oder mehrere Versuchsfahrzeuge automatisch in beliebiger Anordnung zueinander gefahren und mittels Funkkommunikation hochpräzise aufeinander synchronisiert.
Diese Versuchskonstellation ist z.B. zur Programmierung von Fahrerassistenzsystemen künftiger Generationen wie Abbiegeassistenten oder Abstandsregelsystemen als Voraussetzung notwendig.

eingebauter Lenkroboter hinter dem Originallenkrad
Fahrer kann Fahrzeug weiterhin ungehindert bedienen

Pedalrboter CF A200 B1000
Antriebseinheit direkt vor Fahrersitz montiert

Inter Robot Communication
garantiert zuverlässige Kommunikation
Vorteile der VEHICO Fahrroboter
Prinzipaufbau
CO.Sync basiert auf zwei oder mehr mit CO.Drive ausgerüsteten Fahrzeugen zum autonomen Fahren. Da beim automatischen Fahren zwar die fahrzeugeigenen Zustandsdaten eingeregelt werden, andere potentielle Versuchsteilnehmer jedoch nicht berücksichtigt werden, stellt CO.Sync eine entsprechende funktionale Erweiterung dar.
Über eine Funkverbindung werden die Daten der Einzelfahrzeuge auf ein spezielles Synchronisationsmodul übermittelt. Dieses generiert anhand der vom Anwender vorgegebenen Versuchskonstellation dynamische Sollwertvorgaben, die an die Fahrzeuge übermittelt werden. Eine optimale Synchronisation der Fahrzeuge aufeinander ist so trotz eventueller Störeinflüsse garantiert.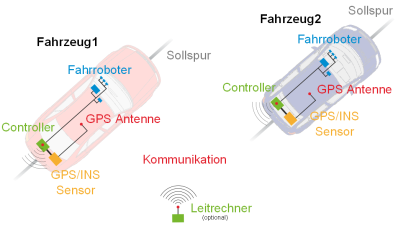
Versuchsausstattung
Benötigte Komponenten

Lenkroboter
Unsere gesamte Lenkroboterpallette kann in Verbindung mit der Fahrdynamikregelung CO.Sync eingesetzt werden.

Pedalroboter Flex Serie
Die Pedalroboter der Flex Serie mit Gaspedal- und Bremsroboter können in Verbindung mit unseren Fahrdynamik-regelungen eingesetzt werden.

Inter Robot Communication
Mit der Inter Robot Communication IRC können die Daten zwischen den VEHICO-Fahrrobotern in unterschiedlichen Fahrzeugen übertragen werden.
Leistunsmerkmale
Vorteile von CO.Sync
CO.Sync überzeugt durch die folgenden Leistungsmerkmale:
- dynamische Synchronisation zwischen Robotern in verschiedenen Kabinen während des Testlaufs
- Triggersignale können online an Roboter in anderen Fahrzeugen gesendet werden
- Sensor- und Robotersignale können online zwischen den Fahrzeugrobotern ausgetauscht werden
- jedes Testfahrzeug kann einfach durch VEHICOs Dynamic Target Mover für Tests mit Softtargets ersetzt werden
- alle Roboter können zentral konfiguriert und von einem Fahrzeug aus oder stationär von einer Basisstation aus bedient werden
Einsatzbereiche
Zahlreiche Anwendungsbereiche
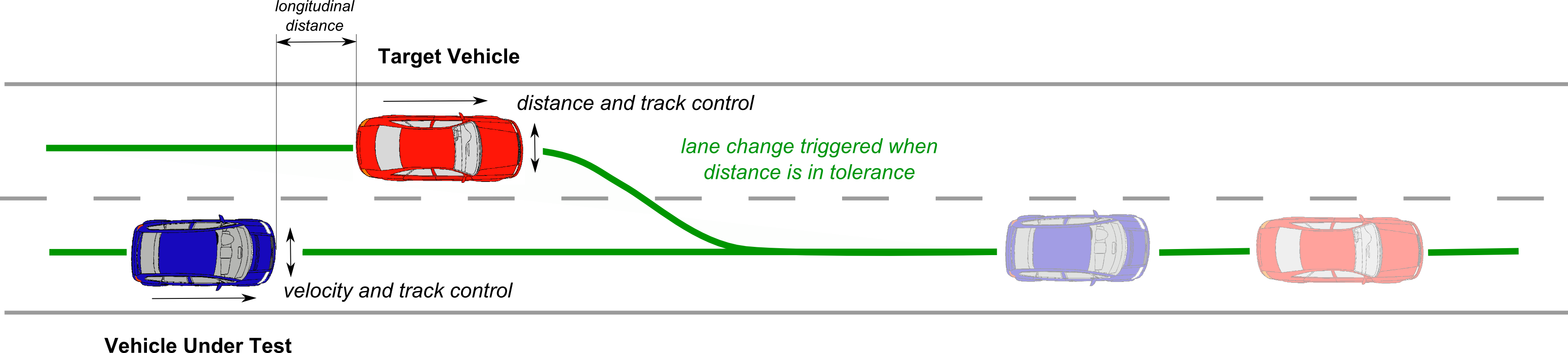
CO.Sync kommt überall dort zum Einsatz, wo es besonders auf die Relativposition zweier Fahrzeuge zueinander ankommt, wie beispielsweise die Einhaltung eines bestimmten Abstandes.
Ein weiterer Anwendungsbereich sind Fahrzeugversuche bei denen sich ein oder mehrere Fahrzeuge zu einer bestimmten Zeit an einer definierten Wegmarke befinden müssen, um beispielsweise zeitgenau in bestimmte Messbereiche einzufahren.
- Entwicklung und Validierung zukünftiger Fahrerassistenzsysteme und Fahrdynamikregelungen
Bsp: ACC, Abbiegeassistent, Collision Avoidance etc. - Unfallrekonstruktion
insbesondere für Fälle, bei denen ein Unfallgeschehen mit zwei beteiligten Fahrzeugen nachgestellt werden muss - Crash
Kompatibilitätstests und Fahrzeug-Fahrzeug-Versuche unter beliebigen Winkeln
Kontakt
Kontaktieren Sie uns
Haben Sie weitere Fragen oder benötigen Sie weitere Informationen?
Wir helfen Ihnen gerne weiter.
Kontaktieren Sie uns oder einen unserer Salespartner.
Telefon
+49 531 20835 110