Products
- Home
- Products
- Objective testing
- exact and reproducible driving tests
- automatic driving on GPS basis
- automation of test bench procedures
... this and more are the fields of application of VEHICO driving robots.
More and more car manufacturers, suppliers, testing facilities, authorities and research institutions worldwide are enthusiastic users of our products.
Our customers consistently praise the intuitive operation, rapid in-vehicle installation, unmatched flexibility for diverse test scenarios, and outstanding support. Looking for dependable solutions for reproducible vehicle tests? You’re in the right place!
Products
Our Product Portfolio
Steering Robots
The ultimate systems for precise control of a vehicle's steering wheel.
Pedal Robot Flex Series
The Flex Series combines multiple pedal drives in a single, versatile robot system, ensuring maximum adaptability.
Combined Brake and Accelerator Robot
A dual-function pedal robot capable of seamlessly controlling both brake and accelerator pedals in one compact system.
Inter Robot Communication IRC
A high-range wireless communication system tailored to meet the unique demands of vehicle testing.
Remote Controlled Driving
Enables simple and efficient unmanned driving tests through the integration of a driving robot and remote control.
Track Controlled Driving
Automatic track guidance ensures precise alignment with track-specific XY-coordinates for accurate testing.
Automatic Driving
Automatic driving ensures precise travel along XY route coordinates with customisable speed profiles.’
Synchronised Driving of Multiple Vehicles
Facilitates the synchronized movement of two or more vehicles in any configuration, enabled by advanced radio communication.
Robot Simulator
The Robot Simulator offers full driving robot software functionality in a compact format, streamlining test preparation and analysis—without requiring hardware.
Modular Expansion Levels
For the greatest possible adaptability
CO.Act
as the simplest product variant enables the steering wheel, pedals or gearstick lever to be controlled by actuators that can be installed quickly.
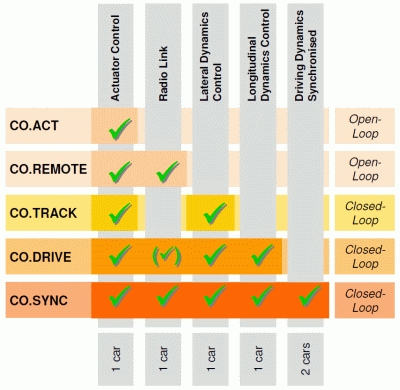
CO.Remote
combines a driving robot with a remote control. By specifying the steering angle and pedal movements from outside the vehicle, unmanned driving tests can be realised in a very simple way, even without positioning sensors.
CO.Track
steers the vehicle automatically. VEHICO lane guidance guarantees that the test vehicle follows a previously defined course reproducibly and precisely.
CO.Drive
represents an extension of the functions of CO.Track in that the test vehicle drives completely autonomously. In addition to controlling the lane, CO.Drive also electronically controls freely definable speed and acceleration curves.
CO.Sync
synchronises two or more autonomously driving vehicles with each other. A special synchronisation module receives the data of the vehicles involved in the test and optimises their driving conditions so that previously defined distances between the vehicles or absolute positions are maintained with high precision at certain points in time.